■ ACMT
關於哈模
精益求精的株式會社哈模今年迎來了創建53 年的紀念。53 年前從油桶鍋爐開始至今致力於注塑機周邊輔助設備。作為注塑成型機取出機械手以及周邊合理化機器的綜合企業,哈模建立了從產品開發到產品銷售的一條龍服務體制。不僅僅在日本國內,乃至世界各國都開設了銷售網站,通過國際市場銷售產品,並收集能滿足客戶需求的諮詢,以及提供更高的技術支援等,從而建立起了與客戶之間的密切聯繫。哈模在不斷把握生產環境自動化、省力化所追求的速度、準確度、效率、安全性等高水準及多方位的需求基礎上,向客戶提供產品的同時,還提供萬全的售後服務。
雙軸伺服驅動擺動式機械手
雙軸伺服驅動擺動式機械手EXZ Ⅱ機身設計,將控制系統(電氣/ 空氣閥)收藏到了高剛性的機身內,使整個佈局不容易受外部環境的影響。通過採用一步到位的機構,將更換模具時的定位棘輪位置移動到容易操作的位置,達到了縮短準備時間的效果。反掌部採用了內置式配線,解除了佈線之間的接觸以及斷裂的風險。將旋轉氣缸的內徑從φ50 增加到φ63,並使旋轉部的重量(Z軸和Y 軸)輕量化約15%。1.6 倍的推進力以及輕量化使得旋轉動作的安定性得到了提高。由於Z 軸和Y 軸採用了伺服電機①取出時間縮短了35%(②可以從內部模具儲存器讀取示教資料。更換模具時不需要調整行程,提高了工作效率。(示教後,50 型)為了保護配管配線,前後軸採用了塑膠鏈。動作流暢,外觀簡潔。前後軸採用了線型導軌。實現了無晃動的快速動作。線上型導軌下方裝備了潤滑劑防漏導軌
智慧化技術發展
研發主軸:Automation → Intelligence → Cognition2D2.5D → 3D 視覺,位置控制順應/ 手眼控制手眼力協調,發展3D 視覺、力量/ 順應控制技術,建立機器人智慧化核心模組,研發手眼力協調技術,發展高誤差容忍性產業機器人,突破撓性零件位置變異問題及換線調機瓶頸,發展智慧型教導技術,突破工作設定困難問題,發展可重組機器人生產單元,因應算換線生產需求。
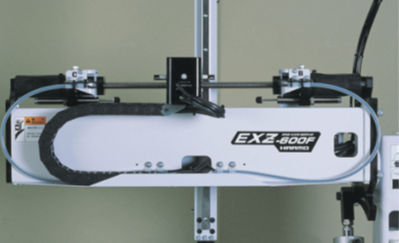

圖1:日本harmo 自動化機械手圖2: 自動化機械手導入應用
機械手種類與原理
目前產業所使用的機器人大多以機械手臂的型式為主,機械手臂又以各種形狀與大小而有所不同,常見的型式有線性手臂、SCARA 手臂、關節多軸機械手臂等。從關節構造上,可分為三軸(含)以下(簡稱三軸)與四軸(含)以上(簡稱多軸)兩大類。之所以要進行分類,是因為這兩方面使用的市場、廠商並不衝突。雖然在應用上的原理類似但是兩者的技術並不相同,也因為使用者的需求不同自然在功能區隔上就會非常明顯。機械手部會根據工作種類附加各式的夾持或加工工具,設計上是模仿人類手部機能為主。從機械手臂行走運動原理,可分為直角座標型、圓柱座標型、極座標型、關節型座標種類。
所謂直角座標就是移動方式與前一臂件分成90 度角,計算用X、Y、Z 等作為代表座標,在各座標的長度範圍內進行工作或運動。圓柱座標手臂包含有三個關節,主要的結構是環繞基底主體作軸承旋轉執行動作,其上方有兩個可直線滑動的手臂沿著水準方向運動和仰俯角垂直方向運動控制,另外一各所能涵蓋的體積為一圓柱型旋轉,所以手臂的端點能掃過兩個圓柱間所有點。極座標有一手臂由另兩個旋轉軸所支撐,一個是圍繞著基座轉動,能做線性運動的收入伸出,另一個是由基座繞垂直做出垂直線性的轉動。關節型旋轉座標上有三個以上的轉動軸,其中一個連杆是裝在基座上能繞基座旋轉,另兩個連杆的運動型態就如同鉸煉間兩工件能做相對的轉動,其轉動軸在水準和垂直都有。
機械手應用與發展
機械手臂在產業自動化的應用已經相當廣泛,因為各個國家產業分佈的不同,以及各產業對於機械手臂的需求量也有差異。主要是使用於人工無法進行或者會耗費較多時間來做的工作,機械手臂在精度與耐用性上可以減少許人為的不可預知問題。自從第一台產業用機器人發明以來,機械手臂的應用也從原本的汽車工業、模具製造、電子制程等相關產業,更拓展到農業、醫療、服務業…等等。多軸機械手臂研發方面,多軸式機械手臂廣泛應用于汽車製造商、汽車零元件與電子相關產業。機械手臂可以提升產品技術與品質,而這些初期工作大多可以藉由機械手臂來完成。機械手臂的精准、零誤差,對於產品的品質掌握自然擁有其優勢,減少品管所花費的時間與人力。工業應用上,以裝配、加工、熔接、切削、加壓、貨物搬運、檢測…等,全球目前產業使用量是以汽車、汽車零元件、化工、橡膠和塑膠等最大。■